
yoncho`s blog
OpenCV 이미지 검출[2]_다각형 근사, 코너 검출 | 주요 특징점 검출, 이미지내의 객체를 검출한다 본문
OpenCV 이미지 검출[2]_다각형 근사, 코너 검출 | 주요 특징점 검출, 이미지내의 객체를 검출한다
욘초 2024. 9. 28. 14:393. 다각형 근사
다각형 근사는 검출된 윤곽선의 형상을 분석할 시 정점의 수가 적은 다각형으로 표현하도록 하는 근사방법이다.
즉, 이미지에서 검출된 그룹화된 윤곽선 정보를 갖고 최대한 적은 정점을 갖는 다각형으로 표현하는 것이다.
다각형 근사는 더글라스-패커(Douglas-peucker)알고리즘을 사용한다.
위 알고리즘은 근사치 정확도 (Epsilon)의 값으로 기존의 다각형과 윤곽점이 압축된 다각형의 최대편차를 고려해 최종 다각형을 근사하게된다.

더글라스-패커 알고리즘은 위와같이 적용된다.

위 짧은 영상을 순서대로 정리해놓은 그림이다.
굵은 점들이 윤곽점, 검은색 실선이 윤곽선들이다.
- 두 극점을 선택한 후 선으로 연결한다. => (a)라는 선
- 그리고 해당 선에 근사치 정확도, 즉 epsilon을 적용한다.
- 근사치 정확도에 포함되지 않는 점들 중, 선분에서 가장 멀리있는 점을 선택하고 연결한다. => (c)라는 윤곽점을 선택 후 연결
- 이젠 그럼 (c)를 기준으로 오른쪽 방향으로 제일 거리가 먼 점을 선택후 연결, 위 1, 2번 작업을 반복한다.
- 정점이 적은 다각형을 근사한다.
다각형 근사 함수
approxCurve = cv2.approxPolyDP(
curve,
epsilon,
closed
)
- curve : 윤곽선, 윤곽선 검출 함수에서 검출된 윤곽선, 배열구성 윤곽점을 활용한다.
- epsilon : 근사치 정확도, 입력된 다각형과 반환될 근사 다각형 사이의 최대 편차 간격을 의미한다.
- closed : 폐곡선, 시작점과 끝점의 연결 여부, True = 마지막점과 첫번째 점을 연결한다.
True로 해야 완벽한 다각형이 완성된다.
다각형 근사 예제
import cv2
src = cv2.imread("gomtange.jpg")
dst = src.copy()
kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (3, 3))
gray = cv2.cvtColor(src, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 230, 255, cv2.THRESH_BINARY)
morp = cv2.morphologyEx(binary, cv2.MORPH_CLOSE, kernel, iterations=2)
image = cv2.bitwise_not(morp)
contours, hierarchy = cv2.findContours(image, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
for i in contours:
perimeter = cv2.arcLength(i, True)
epsilon = perimeter * 0.05
approx = cv2.approxPolyDP(i, epsilon, True)
cv2.drawContours(dst, [approx], 0, (0,0,255), 3)
for j in approx:
cv2.circle(dst, tuple(j[0]), 3, (255,0,0), -1)
cv2.imshow("dst", dst)
cv2.waitKey(0)
cv2.destroyAllWindows()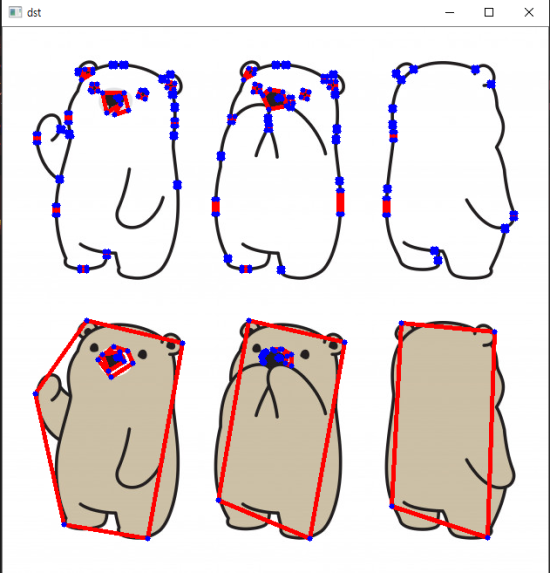
(1) 윤곽선 길이 계산
윤곽선의 길이를 계산한다.
윤곽선 길이 계산 함수
length = cv2.arcLength(
curve,
closed
)
- curve : 윤곽선
- closed : 폐곡선, 윤곽선의 닫힘 여부 (True or False)
(2) 윤곽선 면적 계산
윤곽선 내부의 면적을 계산한다.
윤곽선 면적 계산 함수
area = cv2.contourArea(
contour,
oriented
)
- contour : 윤곽선
- oriented : 방향성, 계산된 윤곽선 면적의 부호를 의미한다. 방향성이 참 일 경우, 윤곽선의 방향에 따라 부호가있는 면적 값을 반환하고. 거짓 일 경우, 절댓값으로 계산된 값으로 반환된다.
(3) 윤곽선 경계 사각형 (매우 중요)
윤곽선의 경계면을 둘러싸는 사각형을 구한다.
윤곽선 경계 사각형 함수
boundrect = cv2.boundingRect(
curve
)
- curve : 윤곽선
(4) 윤곽선 최소 면적 사각형 (중요)
윤곽선의 경계면을 둘러싸는 최소 크기의 사각형을 계산한다.
윤곽선 최소 면적 사각형 계산 함수
rect = cv2.minAreaRect(
points
)
- points : 윤곽선
(5) 윤곽선 최소 면적 원
윤곽선의 경계면을 둘러싸는 최소 크기의 원을 계산한다.
윤곽선 최소 면적 원 계산 함수
center, radius = cv2.minEnclosingCircle(
points
)
- points : 윤곽선
(6) 볼록 껍질 (매우매우 중요 !!!)
윤곽선 볼록 껍질 계산 함수
hull = cv2.convexHull(
points,
clockwise = None
)
- points : 윤곽선
- clockwise : 방향, 검출된 볼록 껍질의 볼록점들의 인덱스 순서를 의미.. 참일경우 시계방향으로 정렬, 거짓일 경우 반시계방향으로 정렬한다.
볼록 껍질 알고리즘은 O(NlogN) 시간 복잡도를 갖는 스크랜스키(Sklansky)알고리즘을 이용해 입력된 좌표들의 볼록한 외곽을 찾는다.
스크랜스키 알고리즘

스크린스키는 경계사각형의 정점(Vertex)을 검출한다. 위 그림에선 정점은 T, L, B, R이 된다.
행당 정점은 볼록점으로 사용한다.
볼록 껍질의 또 다른 볼록점들은 R1, R2, R3, R4영역에 존재하며, Q영역 내부에는 절대 존재하지 않는다 !!
그러므로 우린 R 영역에서 볼록점들을 검출하게된다.
R영역에도 수많은 윤곽점들이 존재하므로 여기서 볼록 껍질을 이루는 볼록점들을 선별하는 과정을 거처야한다.

선별 과정으로 위 그림처럼,
볼록점 시작이 i이며, 다음 번째 볼록점은 i + 1이 된다.
만약 i가 T,L,B, R중 하나 즉, 정점 중 하나 일 경우, i + 1 번째 볼록점과 i + 2 번째 볼록점 를 검출하기 위해
다음 조건으로 볼록점을 선택한다.
- i + 2의 점이 A1영역에 있을경우, i + 2는 i + 1로 활용한다.
- i + 2의 점이 A2영역에 있을경우, i + 2점은 볼록점에서 제외한다.
- i + 2의 점이 A3영역에 있을경우, i + 2점을 볼록점으로 간주한다.
만약 i가 L(정점)이라고 가정하면, A1 영역은 R1이고 A2 영역은 Q영역, A3영역은 R2영역이된다.
이렇게 정점위치에 따라 조건영역이 바뀐다는 점을 알아야한다.
(7) 윤곽선의 모멘트 (매우 중요 !!!)
이미지에서 모멘트란, 영상 픽셀 강도에 대한 특정한 가중평균(모멘트) 또는 일반적으로 어떤 물체의 고유한 특성이나 해석을 할 수 있는 기능 이다.
윤곽선에서 모멘트는 공간 모멘트와 중심 모멘트 ( + 정규화)가 있다.
공간모멘트는 물체의 공간을 나타내는 모멘트로써, 출력시 물체의 최외각 가장자리를 나타내며
중심모멘트는 물체의 중심을 나타내는 모멘트로써, 물체의 중심에 점을 찍어준다.

윤곽선의 모멘트 함수
moments = cv2.moments(
array,
binaryImage = None
)
- array : 윤곽선이나 이미지
- binaryImage : 이진화 이미지, 입력된 array 매개변수가 이미지일 경우, 이미지의 픽셀값들을 이진화 처리할지 결정한다.
4. 코너 검출
코너 검출은 입력이미지에서 코너점을 검출하는 알고리즘이다.
다각형의 꼭지점을 검출하는 것으로 이해하기 쉬운데, 정확하게는 트래킹(Tracking), 객체의 움직임을 추적하거나 관찰하는 것을 하기 좋은 지점을 코너라 한다.
여기서 코너 검출 알고리즘은 높은 도함수를 갖는 지점(가장 두드러지는 코너점)을 계산하고 분석해서 코너 정의에 만족하는 점을 반환한다.
코너는 지안보 시와 카를로 토마시의 특징 검출 알고리즘과 해리스가 제안한 알고리즘을 활용해 검출할 수 있다.
코너 검출 함수
corners = cv2.goodFeaturesToTrack(
image,
maxCorners,
qualityLevel,
minDistance,
mask = None,
blockSize = None,
useHarrisDetector = None
k = None
)
- image : 입력이미지, 8비트 또는 최대 32비트 단일 채널 이미지만 입력가능
- maxCorners : 코너 최댓값, 검출할 최대 코너의 수를 제한한다. 0이하값은 무제한으로 검출하겠다는 소리다.
- qualityLevel : 코너 품질, 반환할 코너의 최소 품질을 설정, 코너 품질은 0.0 ~ 1.0 사이의 값을 할당할 수 있으며, 일반적으로 0.01 ~ 0.10 값을 사용한다. 예를 들어 코너품질이 0.01이면, 가장 좋은 코너의 강도가 1000이라하면, 1000 * 0.01 = 10이다. 10이하의 코너 강도를 갖는 코너는 무시한다.
- minDistance : 최소 거리, 검출된 코너들의 최소 근접거리를 의미한다. 설정된 최소 거리 이상값만 검출한다.
- mask : 입력이미지와 같은 차원을 갖는 이미지이며, 마스크 값이 0인곳은 코너를 계산하지않는다.
- blockSize : 블록크기, 코너를 계산할때 고려하는 코너 주변 영역의 크기
- useHarrisDetector : 해리스 코너 검출기, 참일시 해리스가 제안한 알고리즘을 사용하고, 거짓일시 지안보 시와 카를로가 제안한 알고리즘을 사용한다.
- k : 해리스 측정 계수, 해리스 알고리즘을 사용할때 할당하며 해리스 대각합의 감도 계수를 의미한다.
객체를 인식하기 위해서 코너 검출 알고리즘을 사용한다면, 더 정확한 코너점들을 필요로한다.
정확한 위치좌표값을 계산하기위해서, 근사 계산을 통한 서브픽셀 세밀화를 진행한다.
그러면 검출된 코너의 좌표가 (30, 45)로 나왔는데, 서브 픽셀 세밀화를 하면 (30.5, 45.6)으로 더 정확한 좌표위치를 반환시켜준다.
코너 픽셀의 세밀화를 진행하면 검출된 코너점의 위치를 보정해준다.
코너 픽셀 세밀화 함수
cv2.cornerSubPix(
image,
corners,
winSize,
zeroZone,
criteria
)
- image : 입력이미지
- corners : 코너 검출을 통해 얻어낸 정수 픽셀의 코너 위치를 담고있는 배열
- winSize : 검출크기, 코너 위치를 중심으로 검출크기만큼 확장한다. 검출 크기의 인수값이 (n, n)일때 (n * 2 + 1, n * 2 + 1)의 크기로 영역을 검색한다.
- zeroZone : 제외크기, 검출영역에서 제외할 부분의 크기를 설정한다. 검출크기와 동일하게 작동하며, (-1, -1)일때에는 제외할 영역이 없음을 의미한다.
- criteria : 기준, 코너 픽셀 세밀화 반복 작업의 조건을 설정, 예를 들어 반복횟수가 10회, 정확도가 0.1인경우, 반복횟수가 10회를 달성하거나 정밀도가 0.1을 달성했을시 계산이 종료된다.
코너 검출 및 코너 픽셀 세밀화 예제
import cv2
src = cv2.imread("lego_p.jpeg")
dst = src.copy()
gray = cv2.cvtColor(src, cv2.COLOR_BGR2GRAY)
corners = cv2.goodFeaturesToTrack(gray, 100, 0.01, 5, blockSize=3, useHarrisDetector=True, k=0.03)
for i in corners:
cv2.circle(dst, tuple(i[0]), 3, (255, 0, 0), 5)
criteria = (cv2.TERM_CRITERIA_MAX_ITER + cv2.TERM_CRITERIA_EPS, 30, 0.01)
cv2.cornerSubPix(gray, corners, (5, 5), (-1, -1), criteria)
for i in corners:
cv2.circle(dst, tuple(i[0]), 3, (0, 0, 255), 5)
cv2.imshow("dst", dst)
cv2.waitKey(0)
cv2.destroyAllWindows()



